更新:Analog-1実験は完全に成功しました!パルミターノ宇宙飛行士は、指定された時間枠(1時間)内にすべての要件を完了しました。 このテストは、遠隔操作技術を検証する最初のステップです.
NASAは、今後数年間、宇宙飛行士を月に、そして火星に送りたいという望みについて、かなり前向きでした。彼らは複数の宇宙機関(ESA、ロスコスモス、CNSA、IRSOなど)に加わっており、彼らも地球を越えて最初の乗組員の任務を遂行したいと考えています。ただし、見過ごされがちなのは、人間とロボットが手を取り合って近未来で遠隔操作ミッションが果たす役割です。
たとえば、ESAは、まとめてAnalog-1という名前の一連の実験に着手しました。宇宙飛行士は宇宙からロボットを制御します。昨日(11月18日)、ESAの宇宙飛行士ルカ・パルミターノはISSからオランダのロボットを操縦しました。この実験や他の実験は、危険な、またはアクセスできないオフワールド環境の調査を含む将来のミッションに向けて宇宙飛行士を準備するのに役立ちます。
ローバー(Interactとして知られています)は、宇宙飛行士が軌道からロボットエクスプローラーをリモートコントロールできるようにする通信ネットワーク、ロボットインターフェース、およびハードウェアの作成を目的とした多目的エンドツーエンドロボット操作ネットワーク(METERON)プロジェクトの一部として作成されました。これらのロボットは、将来のミッションのために着陸地点を探し出し、リソースを見つけ、宇宙飛行士のための生息地を準備することができます。

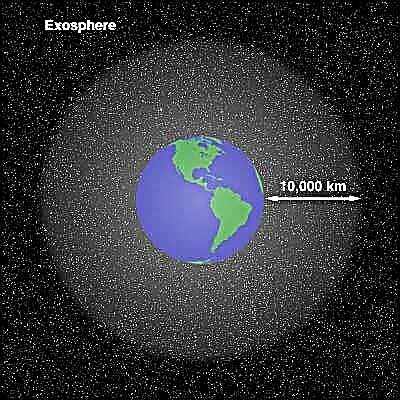
このプロセスの鍵は、特別に開発された「宇宙インターネット」であり、軌道と地表の間、または地球上の離れた場所のいずれかで、オペレーターを最大10,000 km(6,200 mi)離れた場所に接続できます。この接続により、Lucaはローバーとの接触を維持し、時間の遅れはありますが、ローバーが体験したすべてのものを見て、感じることができました。
探査ターゲットは地球から遠く離れているため、これは遠隔操作に関しては非常に重要です。月面車をリモートで操作するには、ミッションコントローラーが秒単位または分単位の遅延に対処する必要があります。地球から月まで、信号はそこに行き来するのに数秒しかかかりません。しかし、火星へのミッションの場合、遅延は4〜24分程度になる可能性があります(地球と火星の相互関係に応じて異なります)。
最後に、従来の接続では、ミッションコントローラーがコマンドを送信し、代わりにデータを受信することしかできません。一方、METERONプロジェクトでは、コントローラは、時間の遅れがあってもロボットが何をしているかを確認し、感じることさえできます。 2つのラップトップと6度の動きのSigma7「フォースフィードバック」ジョイスティックを使用して、制御が提供されます。このハプティックジョイスティックは、ローバー自体が環境から感知するものをコントローラーに体験させます。
ローバーとオペレーターを接続するのは簡単な作業ではありません。ISSからの信号が約144,400 km(89,725 mi)の往復を行う様子を見てください。一方、ISSは地球を29,000 km / h(18,000 mph)の速度で移動しています。これらの信号は、表面から最大36,000 km(22,370 mi)の軌道にある一連の衛星に送信されます。

その後、信号はニューメキシコの米国の地上局、NASAのヒューストンに送信され、大西洋横断ケーブルを介してヨーロッパに送信されます。これらはすべてかなりの時間遅延を引き起こしますが、NASA、ESA、およびその他のパートナー機関によって構築された高度なインフラストラクチャのおかげで管理可能なものです。
最初のセッションでは、ルカがオランダのファルケンブルグの格納庫にある、ESAの欧州科学研究技術センター(ESTEC)の近くにある障害物コースを介してInteractローバーを運転していました。コースの周囲には、月のレゴリスをシミュレートするように設計された土壌の上に置かれた一連の円錐からなる、月の風景を特徴とする背景が配置されました。
最終的な目標は、ルナゲートウェイや火星のベースキャンプなどのステーションからこの種のリモートコントロール調査を実施することです。これらのステーションと地上の探査機を遠隔操作する機能は、月面で持続可能な人間の存在を確立し、火星への乗組員探査ミッション(別名)を実施するための重要な側面です。 NASAの月から火星への計画。
Analog-1実験の次のステップは、フルオンのシミュレートされた月の環境を含む、約1週間で行われるようにスケジュールされたシミュレーションで構成されます。このテストでは、人間が操作するロボットが地質調査やアクセスが困難な場所の探査を実行できるかどうかを評価します。

ドイツのケルンにあるEuropean Astronaut Center(EAC)のチームが科学チームとして行動し、実験を監視します。月の使命の幻想を完成させるために、彼らはルカに潜在的な研究目標を指示し、助言します。これには、Interactローバーが遭遇したシミュレートされた月の岩がさらなる科学的分析に値するか、廃棄する必要があるかが含まれます。
同様のアナログ実験が、METERONシステムを使用してカナダのローバーを制御しているドイツのエンジニアによって行われています。これらの実験は、関連する高度な技術を検証するだけではありません。彼らはまた、宇宙での人間とロボットの協力の価値を実証しています。これは、将来の探査計画で中心的な役割を果たすでしょう。
一方、ESA加盟国の大臣は今月後半(11月27〜28日)にスペインのセビリアのSpace19 +で招集され、将来の科学的目標について話し合います。遠隔操作とその背後にあるテクノロジーの重要性を考えると、METERONとAnalogの実験は必ず登場します。
遠隔操作されているInteractローバーのこのビデオを必ずチェックしてください。