画像クレジット:ESA
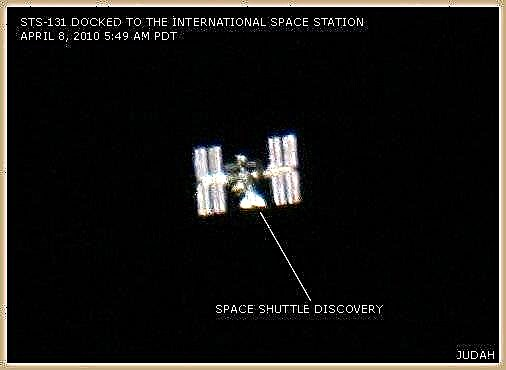
10月10日から14日まで、ESAのSMART-1のイオンエンジンが最後の主要なプッシュで連続推力操縦を実行し、11月13日に宇宙船を月面捕獲ポイントに到達させました。
SMART-1は、月へ向かう途中で、8000万キロ以上をカバーしています。その旅は2003年9月27日、フランス領ギアナのクールーにあるヨーロッパの宇宙港から宇宙船がアリアン5ロケットで打ち上げられたときに始まりました。それ以来、地球の周回軌道が次第に大きくなり、やがて月の重力に捕らえられて、今年の11月に月周回軌道に入ります。
SMART-1ミッションは、2つの主要な目的を追求するために設計されました。 1つ目は純粋に技術的なものです。将来の惑星探査ミッションに適用される多数の宇宙技術を実証およびテストすることです。 2番目の目標は科学的で、主に月の科学に専念します。 SMART-1への旅の独特のルートと期間(13か月)を形作ったのは、技術実証の目標、特に宇宙船の主推進システムとしての太陽電池式イオンエンジンの最初のヨーロッパの飛行試験です。ムーン。
宇宙船を月に近づける地球の周りの長いらせん状の軌道は、イオンエンジンが機能し、宇宙船が可能な惑星間旅行中に移動する距離に匹敵する距離でテストされるために必要です。 SMART-1ミッションはまた、重力支援操縦中に、このようなエンジンによって推進された宇宙船の応答をテストしています。これらは、惑星間旅で現在使用されている手法であり、宇宙船が加速を獲得し、燃料を節約しながら最終目標に到達するために、天体(惑星など)の重力を利用します。
SMART-1の場合、月の引力は3つの「ルナーレゾナンス」操作で利用されています。最初の2回は2004年8月と9月に成功しました。最後の共振操作は10月12日で、10月10日から14日までの5日間近く続く最後の主要なイオンエンジン推力でした。この最後の推力のおかげで、SMART-1は、必要に応じて小さな軌道修正を除いて、エンジンをオンにする必要なしに、地球の周りにさらに2つの軌道を作成します。同じ推力により、宇宙船は月の自然の魅力の領域に徐々に落下し、月面から60 000キロ離れた11月13日から軌道を回ります。
SMART-1は、11月15日にその最初の危険(月面からの最初の最も近い距離)に到達します。その間、イオンエンジンは月の周りの軌道で最初の大きな推力を発揮します。その後、2005年1月中旬に最終的な運用軌道(月の極を超えて3000〜300 km)に到達するまで、小さなループで月を周回し続けます。それ以降、6か月間、Smart-1が起動します月面の主要な化学元素の最初の包括的な調査であり、月が形成された方法の理論を調査します。
元のソース:ESAニュースリリース