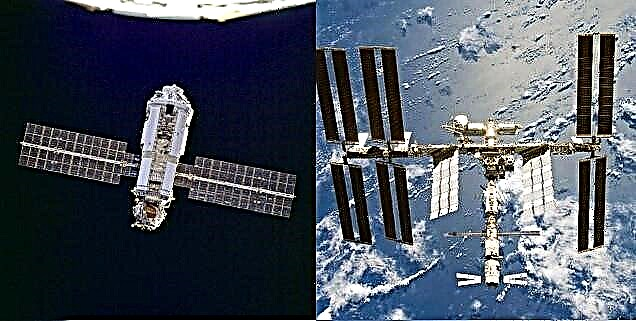
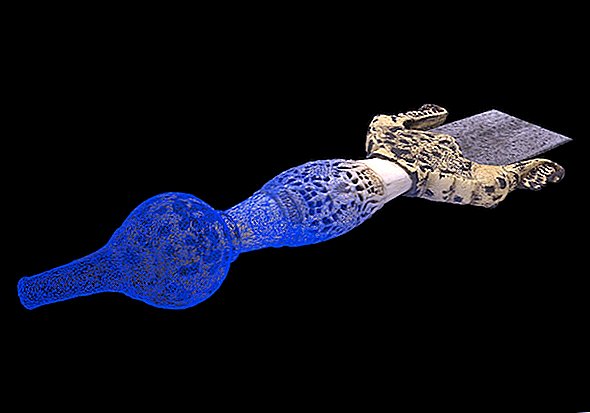
ESAのSMART-1は月を16か月周回していますが、燃料が不足しているため、寿命はほぼ終わりです。もしその軌道が自然に崩壊するなら、宇宙船は月の向こう側に衝突するでしょう。しかし、コントローラーは、地球ベースの望遠鏡の観点から、それが近い側に影響を与えるのを助ける戦略を考案しました。
ESAの月の使命は、月を周回する16か月後、科学的探査の終わりに備えています。 6月19日、SMART-1ミッションコントローラーは、ミッションが終了したときに科学データのリターンを高めるために宇宙船を配置することを目的とした17日間の一連の操作を開始しました。
ヨーロッパで最初に成功した月の任務であるSMART-1は2006年9月3日に終了する予定であり、以前の多くの月の任務と同様の処分計画で月面に影響を与え、2003年の打ち上げからほぼ3年後の予定です。
最近開始された操縦キャンペーンは、科学的な観点から不利な時に宇宙船が月と交差するのを避けることを目的としています。代わりに、ミッション運用へのこの「拡張」は、低高度の科学的観測の新しい機会を提供し、月への宇宙船の制御された影響の最中および後に最適な科学のリターンを提供します。
ミッション終了の準備として、ESOCの宇宙船コントローラー、ESAのドイツ、ダルムシュタットにある宇宙船運用センターは、毎秒約12メートルの「デルタ速度」または速度の変化を与える一連のスラスタ点火を開始しました。これにより、軌道の危険(月上で最も近い通過点)が約90キロ上昇し、影響が9月3日にシフトします。
ESAのSMART-1ミッションマネージャーであるGerhard Schwehmは、次のように述べています。 「現在の軌道に基づく予測では、宇宙船は、そのままにしておくと、地上の接触や視界から離れた向こう側の月に影響を与えることが示されました。新しい場所は、南半球南部の月の近くにあります。」
機動キャンペーンでは、ミッション中にすべてのキセノン推進剤の予備が使い果たされたため、電気推進システム(イオンエンジン)の使用を除外する必要がありました。ミッションコントロールチームは代わりに想像力豊かなアプローチを開発しました。
宇宙船運用マネージャーのOctavio Camino氏は、次のように述べています。 ESOC。
オフロードは、宇宙船内部の一連の回転する車輪にブレーキをかけることで構成されています。これは、車輪から角運動量を宇宙船に伝達し、その速度を変化させる効果があります。
「姿勢スラスタの非対称発火を使用して、飛行方向に沿った小さな速度変動を生成します。これにより、累積的な効果によって軌道が変更されます」とCaminoは付け加えました。
「これらの操作の後、科学活動はインパクトまで再開し、2つのトリム操作がインパクト時間を調整するための短い中断があり、1つは7月の終わり頃、もう1つは9月の初めです」と彼は結論付けました。
このマニューバキャンペーンと次のトリムマニューバにより、SMART-1の影響の正確な時間と場所をより正確に予測できるようになります。
元のソース:ESAニュースリリース