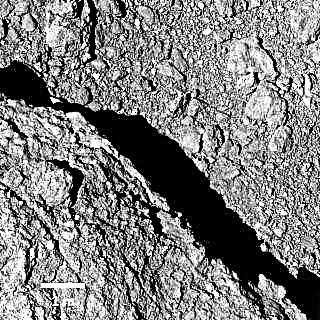
この小惑星リュウグウの画像は、2018年9月21日、宇宙船に向けて2つの小さなホッピングローバーを搭載する直前に、日本の「はやぶさ2」の母船によって高度約64 mから撮影されました。これは、現在までに竜宮の表面を撮影した最高解像度の写真です。
(画像:©JAXA、東京大学、高知大学、立教大学、名古屋大学、千葉工業大学、明治大学、会津大学、産総研)
大きな小惑星リュウグウのこれまでで最も鋭い写真は、岩や瓦礫が散りばめられた複雑な表面を示しています。
日本の宇宙探査庁によると、日本の「はやぶさ2」宇宙船は、2018年9月21日午前12時4分EDT(0404 GMT)に、高度210フィート(64メートル)から光学ナビゲーションカメラ望遠鏡で画像を撮影しました( JAXA)職員。
JAXA関係者が付け加えた、これは、リュウグウの幅3,000フィート(900 m)の表面でこれまでに撮影された最高解像度の写真です。 [日本のはやぶさ2小惑星リュウグウサンプルリターンミッションの写真]
画像が撮られてからわずか2分後、はやぶさ2はMINERVA-II1AとMINERVA-II1Bと呼ばれる2つの小さなホッピングローバーをリュウグウに向けて展開しました。小さなロボットが歴史的な最初に着陸を止め、現在宇宙岩を探索して、さまざまなデータを収集しています。 (他のいくつかの宇宙船は小惑星にそっと着陸しましたが、はやぶさ2のような母艦から配備された探査車はありません。)
すべてが計画通りに進んだ場合、次の着陸は来週になります。 10月3日、はやぶさ2は、フランスの宇宙機関CNESと共同でドイツの宇宙機関DLRが建設したMASCOTという名前の靴箱サイズの着陸機を配備する予定です。
MINERVA-II1AおよびMINERVA-II1Bと同様に、MASCOTはローリングではなくホッピングによって移動します。これは、リュウグウの表面の粗さ、および小惑星の低重力のため、従来のロービングはスターターではありません。はやぶさ2のチームメンバーによると、車輪付き車両は転がり始めるとすぐに岩から浮き上がるとのことです。

2014年12月に開始された1億5000万ドルの「はやぶさ2」ミッションは、今年の6月下旬にリュウグウ周回軌道に到着しました。オービターには、MINERVA-II2と呼ばれる別のバンタムホッパーも搭載されています。これは、来年いつか配備される可能性のある「オプションの」ローバーです。そして、母船は2019年に水面に落下し、2020年12月に帰還カプセルで地球にやって来るサンプルを引っ掛けます。
リュウグウで収集されたさまざまなデータ、および返されたサンプルの分析は、研究者が初期の太陽系と、地球での生活を始めるのを助けるためにリュウグウのような炭素に富む岩が果たしたかもしれない役割をよりよく理解するのに役立つはずだとミッション関係者は述べています。
NASAには、同じ目標の多くを持つ、独自の小惑星サンプリングミッションが進行中です。 OSIRIS-REx宇宙船は、12月31日に地球に近い小惑星ベンヌの周りの軌道に到着し、2023年9月に岩のサンプルを地球に返す予定です。
そしてそれらすべての頭字語について:MINERVAは「小惑星のためのマイクロナノ実験ロボット車両」の略です。 MASCOT for "Mobile Asteroid Surface Scout"; OSIRIS-REx(「起源、スペクトル解釈、リソース識別、セキュリティ-レゴリスエクスプローラー」)。