OSIRIS-RExの「ガイドボールダー」に会ってください。
NASAの宇宙船が1年以上前に小惑星ベンヌに初めて到着したとき、小惑星の表面は予想とはかなり異なっていました。大きく滑らかな表面の代わりに、表面のほぼ全体が岩で覆われています。つまり、NASAはサンプリング手順を再考する必要がありました。
彼らは当初、LIDARを使用してOSIRIS-REx(起源、スペクトル解釈、リソース識別、セキュリティ、レゴリスエクスプローラー)を小惑星ベンヌの表面に導くことを計画していました。 OSIRIS-RExはサンプルの返却任務であり、サンプルを収集するには表面に触れる必要があります。
LIDAR(光検出と測距)は、光のパルスを放射して反射を読み取るナビゲーションシステムです。パルスの戻り時間を測定することにより、光を反射するオブジェクトの画像を「描く」ことができます。結果は「点群」と呼ばれます。これを何百、何千、何百万回も行うと、絵はかなり詳細になります。
OSIRIS-RExのLIDARは、ガイダンス、ナビゲーション、コントロール(GNC)LIDARと呼ばれます。ただし、直径50メートル(164フィート)のタッチダウンサイトに宇宙船を着陸させるように設計されています。ベンヌに到着したとき、小惑星にそのようなサイトがないことは明らかでした。最大のサイトははるかに小さく、幅はわずか16メートル(52フィート)であり、NASAが考えているエリアの約10%です。

したがって、OSIRIS-RExチームは別のソリューションを考え出す必要がありました。安全に宇宙船をはるかに小さなサンプリング地点まで案内できるもの。
NFT、またはNatural Feature Trackingを入力します。
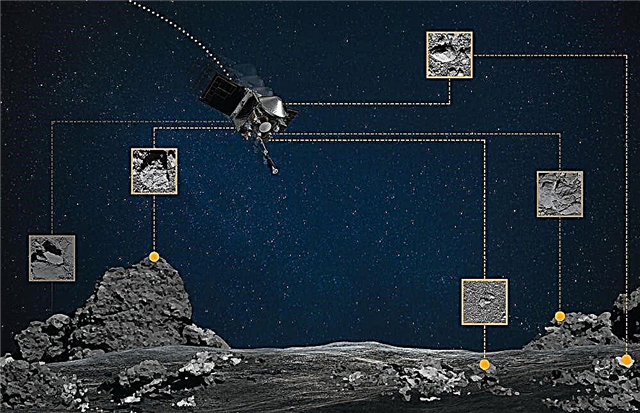
自然特徴追跡は、小惑星ベンヌの表面のサンプリングサイトの高解像度カメラ画像の一種のカタログに依存しています。 OSIRIS-RExがサイトに降下すると、ライブカメラの画像と画像のデータベースを比較して、危険を回避して安全に降下します。 NFTシステムは、LIDARのバックアップとしてOSIRIS-RExミッションに含まれていました。
昨年、宇宙船は潜在的な着陸地点の一連のより接近した接近飛行を実行しました。 NASAは最初に4つの候補地を特定し、次にそれを2つだけに絞り込みました。そして、Osprey、バックアップサイト。接近飛行または高架飛行中に、宇宙船はサイトのアプローチと出発だけでなく、サイトの高解像度画像をキャプチャしました。サイトは、可能な限り正確にするために、さまざまな角度と照明条件で画像化されます。

地球に戻って、OSIRIS-RExチームはこれらすべての画像を使用して、主要なサンプリングサイトであるNightingaleとバックアップサイトであるOspreyの近くにある危険、特に危険な岩を特定しました。次に、それらの画像をOSIRIS-RExのレーザー高度計(OLA)からのデータと組み合わせて、Bennuの表面の詳細なマップを作成しました。
NASAのテクニカルペーパーでは、NFTについて次のように説明しています。各フィーチャは、小惑星表面のパッチに対応する地形情報と関連するアルベドデータの配列で表されます。次に、NFTは予測された太陽の角度とカメラポーズとともにこのデータを使用して、フィーチャーの予想される外観をレンダリングします。これは、正規化された相互相関を使用して、オンボードで収集された画像と照合されます。」

いくつかのリハーサルサンプリング操作が近づいてきており、OSIRIS-RExはこれらの近接アプローチ中にNFTを使用します。 OSIRIS-RExチームはNFTの有効性を監視し、必要に応じて宇宙船がアプローチを中止できるかどうかを確認します。これはすべて自動的に行われます。なぜなら、Bennuはリアルタイムの通信には遠すぎるからです。
8月下旬に、宇宙船は最初の実際のサンプル収集を試みます。 OSIRIS-Rexは、最初の試行が失敗した場合に複数回のサンプル収集を実行できるように装備されています。
宇宙船は2021年に小惑星ベンヌを出発し、2023年にサンプルを地球に返す予定です。
もっと:
- プレスリリース:BennuのBouldersがNASAのOSIRIS-RExのビーコンとして輝く
- NASAテクニカルペーパー:Natural Feature Trackingを使用したOSIRIS-REx自律ナビゲーションから学んだ教訓
- スペースマガジン:OSIRIS-RExは、着陸地点から620メートル上空を飛行しました。残りのベンヌのように、それがボルダーに覆われた悪夢であることを確認します