今のところ、SpiritとOpportunityは赤い惑星をすべて持っていますが、ESAは火星の表面を這うために独自のローバーを送ることを計画しています。過去の水の証拠を探す代わりに、ExoMarsは過去と現在の両方の痕跡を探します。すべてがうまくいけば、ExoMarsは2011年に火星に打ち上げられます。
ESAの野心的で長期にわたるオーロラ探査プログラムの一環として、ExoMarsは火星の痕跡を探します。ミッションには、自動制御ロボット、組み込みの自律性、最先端の視覚地形センサーのためのまったく新しい技術が必要です。
今世紀の40年目には、ヨーロッパが火星への有人ミッションに参加し、人類最大の宇宙探査の1つとなることが予想されます。
オーロラは、火星と月を主なターゲットとする、太陽系の長期にわたるロボットと人間の探査を目的としたESAのプログラムです。
赤い惑星への人間の使命は、自動化された貨物船、事前に配置された補給品とツール、および地球の現在のGPSシステムと同様の火星軌道の通信および航法衛星などの素晴らしい、まったく新しい機能を必要とする主要な複数年の取り組みです。
科学者とエンジニアはすでにESAの最初のロボット「前駆体」ミッションであるExoMarsに取り組んでおり、2011年頃に打ち上げ予定です。
ExoMarsは火星の生物学的環境を探索し、さらにロボットによる、そして後には人間の活動に備える予定です。ミッションのデータは、他の惑星での生命の探索である、外生学の幅広い研究に貴重な情報を提供します。
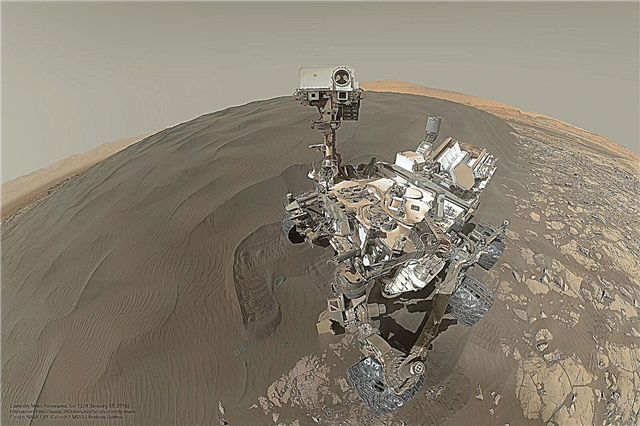
ミッションの主な要素は、NASAの現在の火星探査機ミッションと概念が似ている車輪付きのロボット探査車ですが、科学的目的が異なり、機能が向上しています。
「古典的な直接制御方法は、構造化されていない環境で火星の表面を操作する場合には機能しません。」
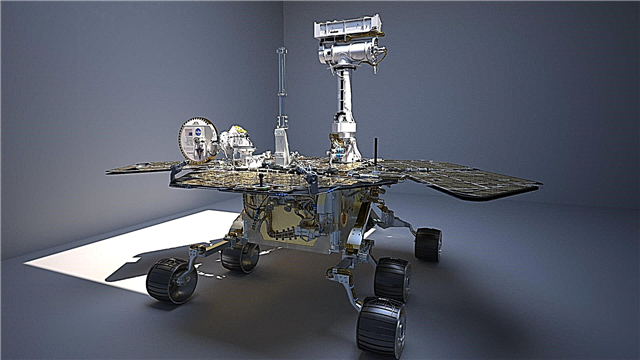
ローバーは太陽電池アレイを使用して発電し、火星の岩が多いオレンジ色から赤色の表面を移動し、史上初の軽量掘削システムとサンプリングおよび処理装置を含む最大12キログラムの科学ペイロードを輸送します。過去または現在の生命の兆候を検索するための一連の科学機器。
距離のタイムラグと複雑さのため、ExoMarsは「スマートな」電気光学を使用して自己ナビゲートし、周囲の地形を視覚的に感知して解釈し、インテリジェントな搭載ソフトウェアを使用して自律的に動作することができます。
自動制御の大きな進歩
この自動化された操作モードはESAの主要な進歩であり、人間のコントローラーを使用して直接宇宙船を制御するために長い間使用されていました。また、ローバーの車載制御システムが新しくなるだけではありません。
「ExoMarsには、現在のアップグレードだけでなく、地球ベースのローバー制御システムのいくつかの側面にまったく新しい技術と技術が必要です」と、ESAの宇宙船オペレーションであるESOCを拠点とする上級宇宙船コントローラーで火星の専門家であるMike McKayは言います。センター、ドイツのダルムシュタット。
ESAコントローラーは、他の体の表面を動き回るミッションをこれまでに操作したことがありません。 2005年にタイタンに着陸したホイヘンスは大気探査機であり、着陸機ではありませんでしたが、タイタンの地表に到達した直後は短時間で機能しました。
ロボットのタスク:生命を求めて何キロも走る
ローバーの自律操作の1つの典型的な例では、地上コントローラーが高レベルのコマンドを無線で送信して、500メートルから2000メートル離れた科学的に興味深い場所に移動し、地表の下を掘削して土壌をサンプリングするなどの科学操作を行うように指示します。生命徴候のため。ただし、車両は移動の詳細を独自に処理します。
3Dカメラで地面を調査し、デジタル地形モデルを作成し、その現在位置を確認し、内部シミュレーションを実行し、障害物、ローバーの現在のステータス、リスク/リソースの考慮事項に基づいて、最適な経路を自律的に決定します。
「それからそれはターゲットにそれ自身を運転します。 ESAの運用局の人間宇宙飛行および探査運用部門の責任者であるボブチェソンは、次のように述べています。
ExoMarsは現在のロボット探検家から利益を得ています
ExoMarsは次世代のロボットとして、NASAのMars Explorer Rover(MER)ミッションなど、現在の世代から学んだ教訓から利益を得ます。 「私たちは姉妹機関の経験から学ぼうとすることに恥ずかしがり屋ではありません」とChessonは言います。
「ExoMarsは文化の変化を必要とします。真に学際的な運用コンセプトを開発する必要があります。」
自律機能を可能にする革新的な地上制御
ExoMarsの場合、地球上のコントローラーは、ESAが惑星を周回する個々のミッションのために現在設定している専用コントロールルーム(DCR)と概念が似ている「ローバー専用コントロールルーム」に配置されます。
ESOCは、全体的なミッション運用管理センター(MOCC)として機能し、発射および初期軌道フェーズ(LEOP)、火星への巡航、降下モジュールの分離と着陸、およびローバー出口を制御し、ローバーサーフェス操作の管理を行う可能性があります。イタリアのトリノにある高度なロジスティクス技術エンジニアリングセンターであるALTECにあるローバーオペレーションセンターから実施されます。
「ローバーの地上制御システム、つまり地上セグメントの設計は、ローバーの科学的および運用上の目標に依存します。これはまだ最終的なものではないため、地上システムはまだ進化しています」とChesson氏は言います。 「基本的に、基本的なテレメトリー機能とテレコマンド機能は基本的に現在と同じですが、ローバーの自律機能を可能にする大幅に新しい機能が追加されます。」
「子供を散歩させる」
地上制御システムは、高レベルのミッション計画ツールを有効にし、ローバーのデジタル地形と3Dモデリング、地上経路と軌道計画、地上シミュレーション、およびペイロード制御と科学との緊密な統合の監視を可能にするコンピューティング設備を少なくとも必要としますオペレーション。
ESOCの計画エンジニアでロボット工学の専門家であるラインホールドベルトラン氏は、「構造化されていない環境で火星の表面を操作し、信号の遅延が大きい場合、従来の直接制御方式は機能しません」と述べています。 「ExoMarsは文化の変化を必要とします。私たちは真に学際的な運用コンセプトを開発する間、「子供が自力で歩むようにする」必要があります。」
元のソース:ESAニュースリリース