宇宙ロボットがコースから外れると、ミッションプランナーは本当に嫌いになります。私たちは確かに最近成功の確率を改善しています(火星の好奇心の7分の恐怖を覚えていますか?)が、ある宇宙機関が着陸をより正確にすることができる空想シミュレータをその袖の上に持っています。
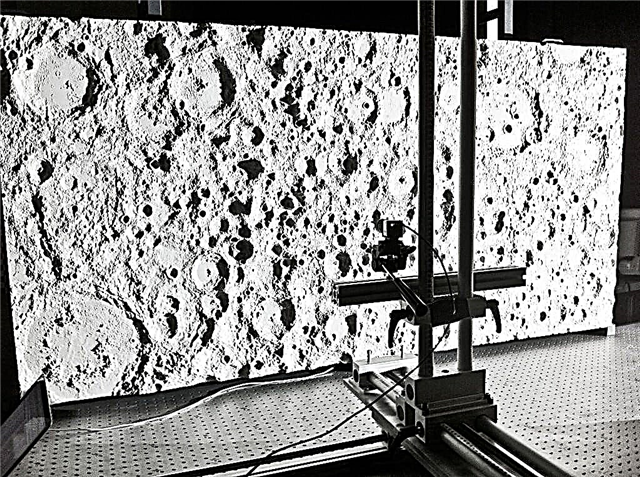
上に示すように、このソフトウェアとハードウェア(European Space Agencyでテスト済み)は非常に印象的なフランスの航空宇宙センターONERAであり、当局は最近、主任研究者にこの作業に対する賞を与えました。
「私がパリの観光客なら、エッフェル塔、凱旋門、ノートルダム大聖堂などの有名なランドマークへの道順を探して、地図上の自分の位置を見つけるのを助けるかもしれません」と、Jeff Delaune博士は述べています。 。研究を行う学生。
「同じプロセスが、宇宙船の目であるカメラによって見られる十分な表面ランドマークのある宇宙から繰り返される場合、コンピューターに搭載されている地図と視覚情報を自動的に比較することにより、それがどこにあるかをかなり正確に特定できます。」

ランドマークのクローズアップは遠くから見ると実際には違って見える可能性があるため、このシステムにはその問題を回避する方法があります。
いわゆる「Landing with Inertial and Optical Navigation」(LION)システムは、宇宙船のカメラによって生成されたリアルタイムの画像を取得し、それを以前のミッションからのマップや表面の3Dデジタルモデルと比較します。
ライオンは、それが巨大なクレーターであろうと、小さなボルダーであろうと、それが見るすべてのポイントの相対的なサイズを考慮することができます。
オランダのノールドワイクにあるESAの制御ハードウェアラボでは、当局が月の高解像度マップを使用してシステムをテストしました。
これは単なるテストであり、このシステムが宇宙で使用できるようになるまでの道のりはまだありますが、ESAによると、シミュレートされた位置精度は高度1.86マイルで164フィート(または高度3キロメートルで50メートル)より優れていました。
ああ、それは今のところシミュレートされた月面地形でのみテストされていますが、同じシステムがロボットが小惑星、または火星に着陸するのを助ける可能性があるとESAは付け加えています。
システムが惑星間輸送に最初に当たる時期については何も触れられていないが、デローネはこの研究を無人航空機などの地上の問題に適用するために取り組んでいる。
ESAのWebサイトでテストの詳細を確認してください。
出典:ESA