NASAの火星探査ローバー(MER)は、長寿で大きな成功を収めており、火星の過去における水の役割を理解するのに役立ちました。しかし、SpiritとOpportunityには、多くの人の頭の中で最も重要な質問に答えるための手段が搭載されていません。
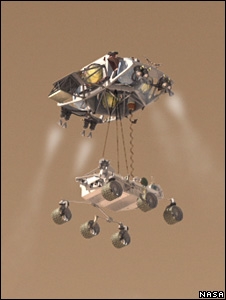
欧州宇宙機関(ESA)によって準備されている新しい宇宙船はその能力を持っています。 ExoMars 2013ミッションのローバーには、科学的なペイロードの一部として、搭載された地下レーダー、ドリル、および生命検出装置が搭載されます。
ミッションの準備に役立つように、ウェールズのアベリストウィス大学の科学者は、実験室で火星の表面をシミュレートして、車両の「ロービング」機能をテストしました。また、サンプルを収集するためのロボットアームとパノラマカメラもテストされています。
ExoMarsミッションには、ローバーに最適な着陸地点をスキャンするオービターもあります。ローバーは6か月で10か所の異なる場所に移動する予定です。ローバーは、地表と地表をスキャンできるレーダーシステム、地表から1〜2メートル掘り下げて、過去または現在の生命を探す船内計器に持ち込まれるサンプルを収集できるドリルを使用します。火星の風景の中。
このシステムの一部であるロボットアームは、2003年に火星の表面に墜落した運命の悪いビーグル2着陸機の一部であったアームに似ています。しかし、新しいアームは改良されており、アームが搭載されたカメラと岩石のサンプルを自律的に取得することができます。
ローバーの重量は、NASAのMERに匹敵する約140〜180 kgです。 ExoMarsミッションの主な科学的目的は、火星の表面の生物学的環境を研究し、火星の地球化学と水の分布を特徴付け、将来の人間のミッションに起こり得る表面の危険を特定することです。
ミッションは2013年に打ち上げられ、2014年に火星に着陸する予定です。
元のニュースソース:BBC