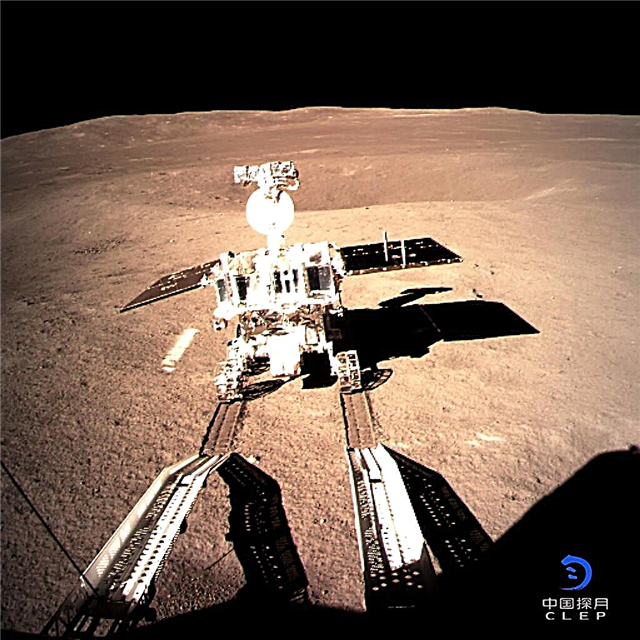
月の向こう側にローバートラックの最初のセットがあります。
昨夜(1月2日)、中国のロボット化された長江4着陸船ローバーデュオが、月の大部分が未踏の遠い側で、これまでにないソフトタッチダウンを引き離しました。そして今日(1月3日)、ローバーは幅115マイル(186 km)のフォンカルマンクレーターの灰色の土の床に転がり、静止した着陸船の上の以前の位置からツインランプを這い降りていました。
また、今日、中国はローバーの名前「Yutu 2」を明らかにしました。このモニカはひどく創造的ではないかもしれませんが、それは非常に理にかなっています。オリジナルのYutuローバーは、着陸船とともに、2013年12月に長江3ミッションで月の手前に着陸しました。また、Chang'e 4は元々Chang'e 3のバックアップとして設計されたため、2つのミッションは多くのハードウェアを共有しています。 [写真で見る中国の長江4ムーンファーサイドランディング]

Yutu 2とその着陸仲間は、向こう側で最初の詳細な科学調査を行います。 2つのクラフトトートはそれぞれ4つの科学機器をトートし、これらにより、ペアはフォンカルマンの表面と表面近くを非常に詳細に特徴付けることができます。このクレーターは、さらに大きなインパクト機能である、幅1,550マイル(2,500 km)の南極エイトケン盆地内にあります。
着陸船は生物学的実験も行っています:小さなスズを含むカイコの卵とジャガイモを含むいくつかの植物種の種子。ミッションチームのメンバーは、これらの生物が低重力の月環境でどのように成長および発達するかを研究することを目指しています。

着陸船とYutu 2は、月の向こう側が常に私たちの惑星とは反対側を向いているため、データを直接地球に向けることはできません。確かに、この通信の複雑さは、遠くの表面が機能している宇宙船を以前に歓迎しなかった大きな理由です(ただし、数年に渡っていくつかのプローブが墜落しました)。
したがって、長江4デュオは、2018年5月に中国が月を超えて重力的に安定した地点に打ち上げたQueqiaoと呼ばれる中継衛星に依存します。同時に。
Chang'e 4は、中国のロボットによる月探査の野心的なプログラムの最新のステップであり、衛星の名前は中国神話の月の女神に由来しています。 (ちなみに、この神話では、ユツはチャンイーのペットのウサギです。)チャンイー1とチャンジー2のミッションは、それぞれ2007年と2010年にオービターを月に送り、チャンジー3は2013年後半の手前のタッチダウン。
その後、2014年10月に、長江5T1ミッションは、月を巡る8日間の旅で試作カプセルを打ち上げました。主な目標は、今年の早い時期に打ち上げられるチャンゲ5サンプルリターンミッションに必要な技術を証明することです。
エイリアンライフの検索に関するマイクウォールの本、そこに」(グランドセントラルパブリッシング、2018年、カール・テイト)は現在出ています。 Twitterで彼をフォローする@michaeldwall。フォローする@Spacedotcomまたはフェイスブック。もともと公開Space.com.