来たる7月、 火星2020 ローバーは、フロリダ州ケープカナベラルから進水し、赤い惑星への旅を始めます。 Jezero Craterに着陸した後、ローバーは次のような科学操作を開始します 好奇心 これは、荒れた地形を運転し、大気をサンプリングし、ドリルサンプルを収集し、それらを化学分析にかけることで構成されます。
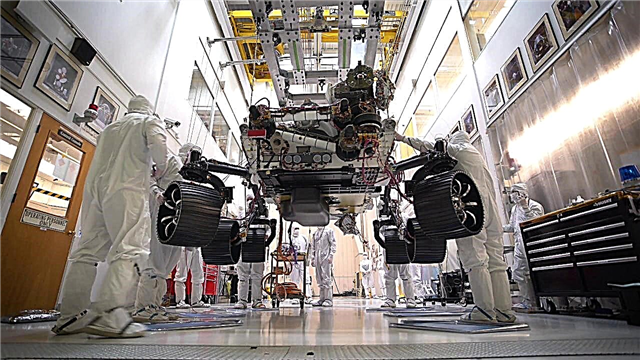
このミッションに備えるために、NASAのジェット推進研究所のエンジニアリングチームはローバーをそのペースで動かしています。 10月8日、これにはローバーの全重量を初めて脚と車輪にかけることが含まれます。このイベントは、乳児が初めて立ったのと同じ意味で、以下に示すタイムラプスビデオでキャプチャされました。
正確には、ローバーの重量は1トン(1,050 kg)なので、自重を支えるのは簡単なことではありません。その姉妹ローバーのように 好奇心、 この重量を運ぶ作業は、チタン製の脚で本体に接続された6つのアルミニウムホイールによって行われます。各車輪には、ローバーが火星の起伏の多い地形を運転して操縦できるようにする牽引力を提供するクリート(またはグラウザー)があります。
JPLで火星2020に取り組んでいる機械システムエンジニアのベンリッグスは、最近のNASAの報道声明で次のように述べています。
「何年にもわたる設計、分析、テストを経て、初めてローバーの車輪を見るのは素晴らしいことです。チーム全体が、それほど遠くない将来、火星の同じ構成で彼女に会うのを楽しみにしています。」
ローバーの設計には、「ロッカーボギー」システムとして知られる、複数のピボットポイントとストラットで構成される新しいサスペンションシステムが組み込まれています。これにより、ローバーは各ホイールの重量を比較的一定かつ均等に分散させることで安定性を維持できます。これにより、ローバーはホイールと同じサイズの障害物や窪みをロールオーバーすることもできます。
ホイールには、ローバーが所定の位置で完全に360度回転できるようにする個別のステアリングモーターも搭載されており、過酷な地形での操作性が向上しています。ローバーは45度の傾斜で任意の方向に(転倒せずに)運転できますが、ドライバーは30度以上傾斜した地形を避けます。

タイムラプスビデオに入った写真はすべて、JPLシミュレータービルディング内から撮影されました。 火星2020 ローバーは過去数週間をテストに費やしてきました。これには、その機器、システム、およびサブシステムが火星環境でどのように動作するかについての広範な評価が含まれています。これは、極端な温度と真空に近い状態が特徴です。
時間が来ると、ローバーはNASAの宇宙発射コンプレックス41からケープカナベラル空軍基地のユナイテッドローンチアライアンスの上に打ち上げられます アトラスV ロケット。ミッションは2021年2月18日までに火星に到着し、火星の水の過去の追加の証拠を得るためにジェゼロクレーターを探索し始め、最終的に地球に戻るためのサンプルを収集します。
探査機が火星の過去の(そしておそらく現在の)生命についての決定的な証拠を見つけることも望まれます。以来激怒している議論を解決することに加えて バイキング1 そして 2 ミッションは1970年代半ばに着陸船をそこに送りました、それは最終的に生命が地球の向こうに存在するという疑いの陰を越えて証明します!
それまでの間、2020年の火星に名前を付けるチャンスはまだあります。NASAのWebサイトにアクセスして、提案を行ってください!