以下は、私の新しい本「宇宙からの信じられないほどの物語:宇宙の私たちの見方を変える使命を舞台裏で見る」からの最後の抜粋です。この本は、現在のいくつかのNASAロボットミッションの内観であり、この抜粋は、ここスペースマガジンに投稿された3章、第2章「好奇心を持った火星探査」のパート3です。ここではパート1を、ここではパート2を読むことができます。この本は、印刷物または電子書籍(KindleまたはNook)AmazonおよびBarnes&Nobleで入手できます。
火星探査車を運転する方法
好奇心はどのようにして火星の表面を運転する場所と方法を知っていますか? JPLでは、リモコンのおもちゃやビデオゲームに使用されているのと同様のジョイスティックを使用するエンジニアを想定しているかもしれません。しかし、RCの運転やゲームとは異なり、火星探査車の運転手には、探査車がどこに向かっているかを確認するための即時の視覚入力やビデオ画面がありません。また、着陸時と同様に、コマンドがローバーに送信されてから火星で受信されるまでには常に時間遅延があります。
「タイムラグがあるため、リアルタイムのインタラクティブな感覚で運転しているわけではありません」と、ローバードライバーのチームを率いるジョンマイケルモロッキアンは説明しました。
Morookianと彼のチームの実際の役職は「ローバープランナー」で、彼らが何をしているかを正確に説明しています。ローバー自体を「駆動」する代わりに、彼らは事前にルートを計画し、専用ソフトウェアをプログラムし、指示をCuriosityにアップロードします。
「周囲の探査機が撮影した画像を使用しています」とMorookian氏は述べています。 「4つの白黒ナビゲーションカメラからのステレオ画像のセットと、地形の性質についての詳細を提供するMastCamからの高解像度カラー画像によってサポートされるHazcams(ハザード回避カメラ)からの画像があります。先に、サイトの岩や鉱物の種類についての手がかり。これは、科学者にとって興味深い構造を特定するのに役立ちます。」
利用可能なすべてのデータを使用して、Rover Sequencing and Visualization Program(RSVP)と呼ばれる特殊なソフトウェアで地形の3次元視覚化を作成できます。
「これは基本的に火星シミュレーターであり、シミュレートされた好奇心をシーンのパノラマに配置して、ローバーがその経路をどのように移動できるかを視覚化します」とMorookianは説明しました。 「ステレオグラスを装着することもできます。これにより、ローバーを使用しているかのように、目でシーンを3次元で見ることができます。
バーチャルリアリティでは、ローバードライバーはシーンとローバーを操作して、どのルートが最適で、どのエリアを回避するかについてあらゆる可能性をテストできます。そこで、彼らはすべての間違いを犯し(砂丘で立ち往生し、ローバーを傾け、大きな岩に衝突し、絶壁をドライブして)、実際のローバーが火星で安全な状態を保ちながら運転シーケンスを完成させます。
「科学者はまた、興味深い機能の画像を確認し、Rover Plannersに相談して、パスの定義を支援します。次に、その経路に沿って、好奇心をポイントAからポイントBに取得するために必要な詳細なコマンドを作成します」とMorookianは言いました。 「また、ロボットアームを使用してサイトと接触するようにローバーに指示を与えるために必要なコマンドを組み込むこともできます。」

したがって、毎晩、ローバーは、8時間シャットダウンして、原子力発電機でバッテリーを充電するように命じられます。しかし、最初の好奇心は、地形の写真や科学情報などのデータを地球に送信します。地球上で、ローバープランナーはそのデータを取得し、計画作業を行い、ソフトウェアプログラミングを完了し、情報を火星に送り返します。次に、好奇心が目覚め、指示をダウンロードして動作するように設定します。そして、サイクルが繰り返されます。
CuriosityにはAutoNav機能もあり、ローバーはチームが画像でまだ見ていない領域を移動できます。そのため、AutoNavは潜在的な危険を感知して、丘を越えて反対側を下って未知の領域に到達する可能性があります。
「それは、計算コストが高いため、あまり頻繁に使用しません。つまり、ローバーがそのモードで動作するのにはるかに長い時間がかかります」とMorookian氏は述べています。 「多くの場合、翌日に来て、画像を見て、見渡す限り運転する方が良い取引だと思います。」

MorookianがJPLのローバー計画チームが使用するさまざまな部屋を見せてくれたとき、彼はいくつかの異なるタイムスケールで運用する必要があることを説明しました。
「毎日のルート計画だけでなく、火星偵察オービターのHiRISEカメラからの軌道画像を使用して長期的な戦略計画を行い、軌道から見た機能に基づいてパスを選択します。私たちのチームは戦略的に働き、何ヶ月もかけて最善の道を定義します。」
スープラタクティカルと呼ばれる別のプロセスは、来週だけに目を向けています。これには、ローバーが短期的に行う活動のタイプを管理および改善する科学プランナーが含まれます。また、チームの誰も火星時間に住んでいないため、金曜日にローバープランナーは数日間計画を練ります。
「週末は仕事をしないので、金曜日の計画には複数の活動が含まれています」とMorookian氏は述べています。 「2つの平行したチームが、ローバーが運転する日と、ロボットアームや他の器具を使用するなど、他のアクティビティを行う日を決定します。」
週末にローバーから収集されたデータは監視されますが、問題がある場合は、チームが呼び出され、より詳細な評価が行われます。 Morookianは、緊急の週末チームに何度か関与しなければならなかったと述べましたが、これまでのところ深刻な問題はありません。 「しかし、それは私たちをつま先に留めておく」と彼は言った。
ローバーは、ローバーデッキの全体的な傾きの量と車輪のサスペンションシステムの関節の数に関する多くの反応安全チェックを備えています。そのため、ローバーが大きすぎるオブジェクトを通過すると、ローバーは自動的に停止します。
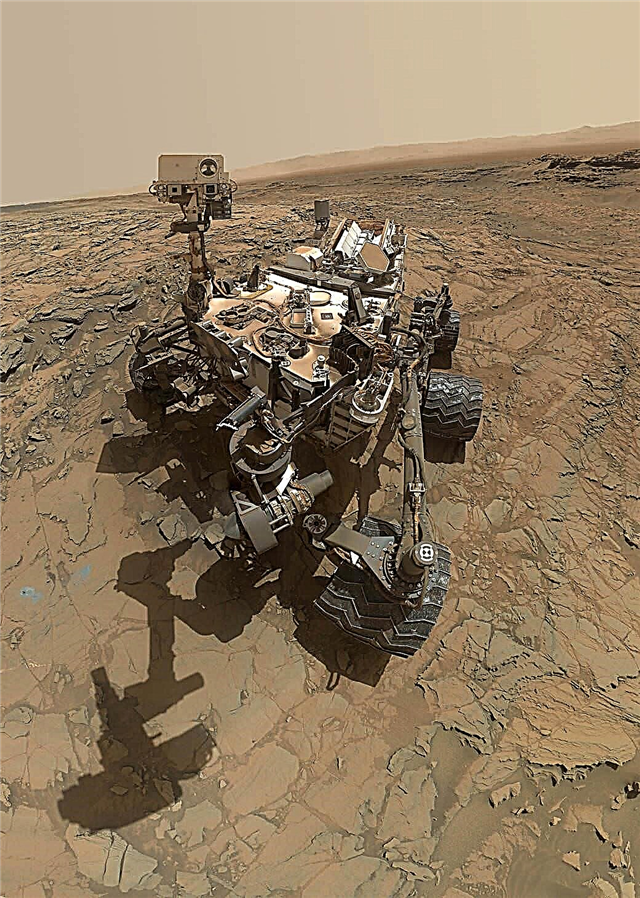
好奇心はスピードのために作られたのではありません。 1日に最大660フィート(200メートル)移動するように設計されていますが、Solの中でそれほど遠くまで移動することはめったにありません。 2016年の初めまでに、ローバーは火星の表面を合計で約7.5マイル(12 km)走行しました。

好奇心がどこまで移動したかを判断する方法はいくつかありますが、最も正確な測定は「視覚オドメトリ」と呼ばれます。好奇心には、モースコード文字の形でホイールに特殊な穴があり、「JPL」と綴られています。火星の土壌を横断する、ローバーの科学およびエンジニアリングチームの。
「視覚オドメトリは、ドライブ上でほぼ1メートルごとに収集された最新のステレオ画像のペアを比較することで機能します」とMorookian氏は述べています。 「シーン内の個々の特徴が一致および追跡され、カメラ(ローバー)が2つの画像間の3次元空間でどのように平行移動および回転したかを測定します。これにより、非常にリアルな感覚で好奇心が進んだことがわかります。 。」
ローバートラックを注意深く検査すると、車輪の牽引の種類がわかります。たとえば、高い斜面や砂地が原因で、車輪が滑っていない場合もあります。
残念ながら、好奇心の輪には、本来あるべきではない新しい穴があります。
ローバーの問題
MorookianとプロジェクトサイエンティストのAshwin Vasavadaはどちらも安心感と満足感を表明しました。全体として、ミッションのこれまでのところ、好奇心はかなり健康な探検家です。サイエンスペイロード全体は現在、ほぼフル機能で動作しています。しかし、エンジニアリングチームはいくつかの問題を監視しています。
「ソル400あたりで、ホイールが予想よりも速く摩耗していることに気づきました」とVasavada氏は語った。

そして、摩耗は小さな穴だけで構成されていませんでした。チームは、パンクと厄介な涙を見始めました。エンジニアたちは、その間にローバーが運転していた硬くギザギザの岩によって穴が作られていることに気づきました。
「我々は、ダメージを与えている種類の「先のとがった」岩を完全に期待していなかった」とバサバダは言った。 「また、いくつかのテストを行ったところ、1つの車輪が別の車輪を岩に押し込み、損傷をさらに悪化させることがわかりました。私たちは今より慎重に運転し、過去にある限り運転しません。ダメージをより許容範囲内に抑えることができました。」
ミッションの早い段階で、キュリオシティのソフトウェアが問題を認識したため、キュリオシティのコンピュータは数回「セーフモード」になり、それ以上の活動と電話の持ち込みを拒否するための対応が行われました。
専用の障害保護ソフトウェアがモジュールと機器全体で実行され、問題が発生するとローバーが停止し、「イベントレコード」と呼ばれるデータを地球に送信します。記録にはさまざまな緊急度のカテゴリが含まれており、2015年の初めに、ローバーは本質的に「これは非常に悪い」というメッセージを送信しました。ローバーのアームのドリルは、短絡のように電流の変動を経験しました。
「Curiosityのソフトウェアは、浴室にある地絡回路遮断器のように、短絡を検出する機能を備えています」とMorookian氏は説明します。「これは、黄色のライトを点灯するだけでなく、「これは非常に悪い」ということです。」
チームは火星に行って問題を修復することができないため、ソフトウェアの更新をローバーに送信するか、運用手順を変更することで、すべてが修正されます。

「今はドリルの使い方にもっと注意を払っています」とVasavada氏は言います。「最初は全力でドリルするのではなく、ゆっくりとランプを上げていきます。それは、私たちが今どのように運転しているのかに似ていますが、もっと生意気ですが、それでも仕事は終わりです。現時点では大きな影響はありません。」
ローバーが遭遇したより柔らかい泥岩と砂岩には、ドリルを軽く触る必要もありました。 Morookianは、標準の掘削プロトコルの攻撃で層状の岩石が耐えられない可能性があるとの懸念があったため、掘削を十分に進めることができる最低の「設定」を使用するようにテクニックを調整しました。
しかし、好奇心が山を越え始めるにつれて、ドリルを使用する機会が増えています。科学チームが画像に表示されているすべての地質学的コンテキストを結び付けるために作業しているため、ローバーはVasavadaが「ターゲットの豊富で非常に興味深い領域」と呼んでいるものを通過しています。
火星のバランスを見つける
イエローナイフベイでの目的地変更により、チームはいくつかの大きな発見をすることができましたが、マウントマウンテンに行くように圧力を感じました。鋭いので、「一年間地獄のように運転した」とバサバダは言った。
現在、山では、ミッションを最大限に活用するというプレッシャーが依然としてあり、少なくとも4つの異なるロックユニット(またはレイヤー)を通過することを目標としています。シャープ。各層は、火星の歴史の本の章のようなものである可能性があります。

「山を探索するシャープは魅力的です」とVasavada氏は語ります。「私たちは本当に素晴らしい発見を混ぜ合わせようとしています。それは、あなたが言うのが嫌いです-私たちを遅くし、山で高くなることです。目の前の岩を注意深く見れば、向こうにある他の興味深い岩を見ることはできません。」
VasavadaとMorookianはどちらも、毎日そのバランスを保つことは難しいことだと語っています。科学のために運転と停止を完全に最適化する「曲線の膝」または「スイートスポット」と呼ばれるものを見つけることです。
次に、すべての機器で完全な観測を行うのをやめることと、それほど強烈でない観測が行われる「フライバイサイエンス」を行うことのバランスがあります。
「私たちはできる限りの観察を行い、できる限りすべての仮説をリアルタイムで生成します」とVasavadaは言いました。 「100の未解決の質問が残っていても、十分なデータを取得していることがわかっていれば、後で質問に答えることができます。」
好奇心の主な目標は頂上ではなく、地質学者が歴史の中で多くの水を見た岩とそうでなかった岩の境界を見つけると予想される約1,330フィート(400メートル)の領域です。その境界は、火星の湿った惑星から乾いた惑星への移行への洞察を提供し、惑星の歴史の理解における重要なギャップを埋めます。

好奇心がどれほど続くのか、あるいはその前身であるスピリットとオポチュニティのように誰もが驚かされるのかどうか、誰も本当に知りません。火星での1年(地球2年)の「主要な任務」を通過し、現在は拡張任務にある1つの大きな変数は、RTG電源です。利用可能な電力は着実に減少し始めますが、ヴァサバダとモロキアンのどちらも、少なくとも地球で4年間問題が発生するとは考えておらず、適切な「育成」により、電力は12年以上持続する可能性があります。
しかし、彼らはまた、好奇心がどれだけ続くか、またはどのような予期せぬ出来事がミッションを終わらせるかもしれないかを予測する方法がないことも知っています。
野獣
好奇心には、以前の火星探査機のような個性がありますか?
「実際にはありません。人々がスピリットとオポチュニティで行ったように、このローバーを擬人化することはないようです」とVasavada氏は語った。 「私たちはそれと感情的に結びついていません。社会学者は実際にこれを研究しています。」彼は面白がった笑顔で頭を振った。
ヴァサバダは、それが好奇心の大きさと関係があるかもしれないと述べました。
「私はそれを巨大な獣だと思います」と彼はまっすぐに言った。 「しかし、決して卑劣なやり方ではありません。」

この使命を特徴付けるようになったのは、すべての面でのこの使命の複雑さであるとバサバダ氏は言います。500人を協力させ、全員の才能を最適化するという人間の要素。ローバーを安全かつ健康に保つ。毎日10個の機器を使用し続けますが、これらは完全に無関係な科学タスクを実行している場合があります。
「毎日が私たち自身の小さな「7分の恐怖」であり、多くのことが毎日正しく行われる必要があります」とVasavada氏は述べています。 「100万の潜在的な問題と相互作用があり、あなたが台無しにできる100万の方法があるので、物事がうまくいかない可能性があるすべての方法を常に考えなければなりません。複雑なダンスですが、幸いにも素晴らしいチームがあります。」
それから彼は笑顔で言いました、「たとえこの獣であっても、この使命はエキサイティングです。」
マクミランの子会社であるページストリートパブリッシングから、「宇宙からの信じられないほどの物語:宇宙の裏側から見た、宇宙に対する私たちの見方を変える使命を見る」が出版されています。