小惑星、原始惑星、小さな月など、その中にある多くの小さな世界から太陽系について学ぶことはまだありません。スタンフォード大学の1人の研究者が、大量に探索できるローバー/宇宙船ハイブリッドの群れを解き放つことを提案しています。
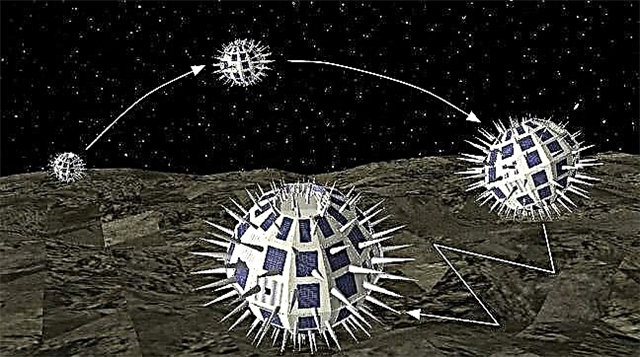
スタンフォード大学の航空学および宇宙学の助教授であり、JPLの研究関連機関であるマルコパヴォーネは、NASAの革新的先進概念(NIAC)プログラムに基づいて、火星の衛星フォボスなどの小さな世界に配備された小さな球形ロボットを見るという概念を開発しています。そして、彼らが低重力を利用して文字通り飛躍的に探索するデイモス。
このようなミッションの低コストが提案されているため、複数の宇宙船が世界中に散らばり、カバーできる領域が増えるだけでなく、さまざまな表面を探索できるようになります。また、1つの宇宙船がミッション全体を失敗させたとしても、妥協はありません。
この概念は、NASAが過去に火星探査機を使って行ったことと似ていますが、宇宙船の数が増える(そしてコストが削減される)点が異なります。
ロボットは「母」の宇宙船から配備され、着陸、転落、跳躍、低質量の世界を横切って跳躍するときに跳躍します。
そのような世界の表面から私たちの最初のビューを提供することに加えて、Pavoneのハイブリッドローバーは、将来のより詳細な調査への準備にも役立ちます。
「小天体の体系的な探査は、太陽系の起源とその初期の進化を解明するのに役立ち、それらの天体生物学的関連性を評価することになるでしょう」とパヴォネは説明します。 「さらに、地球を超えた将来の人間の使命を考慮して、小さな体の資源の可能性を評価することができます。」
NASAの主任技術者室の詳細については、こちらをご覧ください。
マルコパヴォーネの写真提供