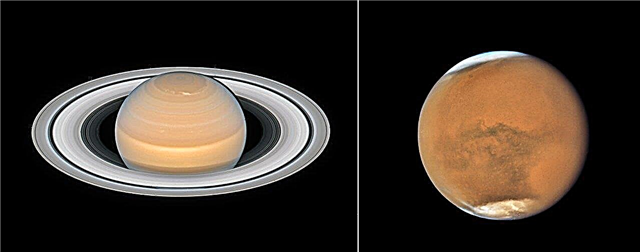
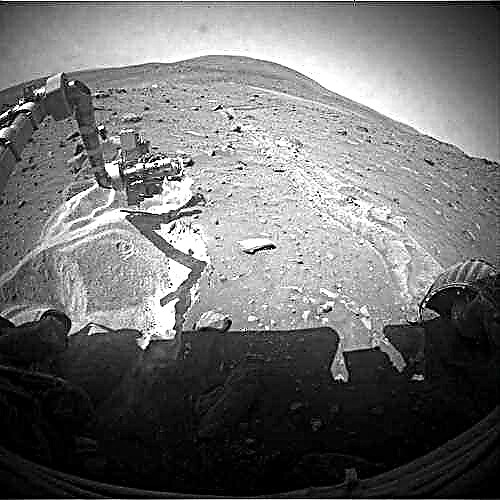
ここにローバーの更新があります:スピリットはホームプレートの西側の彼女の場所にとどまり、ローターを柔らかい土壌に埋め込まれた状態から抽出する方法のテストのためにJPLで作業を続けています。岩がスピリットの下にあり、スピリットが動かないようになっている可能性がありますが、ローバーの下と周囲で何が起こっているかを正確に判断するために、ロボットアームの端にある顕微鏡カメラでさらに多くの画像が撮影されています。しかし、電力供給の増加により、スピリットは彼女の周囲の科学的観察にも忙しくしています。そして、もう1つ、非常に楽しいことですが、ローバードライバーのスコットマックスウェルはTwitterで、スピリットは太陽光パネルを一掃する最近の風のイベントからの非常に大きな力を持っていることをほのめかしており、夜通しの観察を試みる可能性があります。火星の夜空のPANCAM画像をお楽しみに!
火星探査ローバーで、別のローバードライバー、アシュリーストループによるこのビデオ更新をお楽しみください。
Sol 1932(2009年6月9日)の時点で、Spiritの太陽電池アレイのエネルギー生産量は828ワット時です。総走行距離は7,729.93メートル(4.80マイル)のままです。
その間、地球の反対側では、機会がエンデバークレーターに向かう途中で南へとドライブし続けます。 Sol 1906(2009年6月4日)に、ローバーは真南に69メートル(266フィート)のドライブを完了しました。右前輪の上昇したアクチュエータ電流は引き続き問題を引き起こします。 Sol 1910(2009年6月8日)では、多輪電流制限しきい値を超えたため、計画されたドライブが早期に停止しました。次のソルの診断操作は成功し、前のソルの原因が上昇した右前輪モーター電流によるものであることが示されました。

Sol 1912(2009年6月10日)では、長い後方走行が行われました。後進は、上昇した車輪電流を軽減するための1つの手法です。しかし、その72メートル(236フィート)の走行後、車輪電流は上昇し続けました。ローバーのアクチュエータのさらなる休止が検討されています。
今後の計画には、機器のほこりで汚染された仰角ミラーを環境にさらすために、小型熱放射分光計(Mini-TES)のシュラウドを開くことが含まれます。これは、風環境がミラーからほこりを取り除くのを可能にする試みです。
Sol 1912(2009年6月10日)の時点で、Opportunityの太陽電池アレイのエネルギー生産量は431ワット時です。オポチュニティの合計オドメトリは16,569.05メートル(10.3マイル)です。