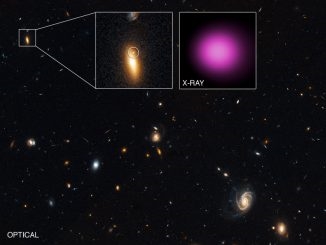
画像の説明:好奇心のゲイルクレーターの着陸地点にあるシャープ山のモザイク。漠然とした距離のゲイルクレーター。このモザイクは、Sol 2のCuriosity(8月8日)から返された3つのフル解像度Navcam画像からステッチされ、34ミリメートルのカメラからのMastcam画像に基づいて色分けされました。 Ken KremerとMarco Di Lorenzoによる処理。クレジット:NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
好奇心探査ローバーは、シャープマウントの最初の詳細な画像を表示し、彼女の究極の運転目標の途方もない最初のビューを提供し、今週末、彼女を完全に操作可能なローバーに変える重要な「脳移植」の真っ只中にいます。
科学チームは6輪の好奇心に、後日、ゲイルクレーター内の着陸地点の床を横断して徹底的に調査した後、探査車の2年間の主要任務中にシャープマウントに登るよう指示します。
34ミリのマストカムカラーカメラに基づいて色分けされた、新しく設置されたカメラと機器のマストにあるNavcamナビゲーションカメラによってスナップされた3つのフル解像度画像を使用して、シャープマウントのベースに焦点を当てたモザイクをご覧ください。
好奇心は火星表面でほぼ平らになりましたが、正面がわずか3度下に傾いており、これまでの画像はそのプログラムされた視点から撮影されたもので、シャープマウントのふもとから約6マイルほどです。
地形には小さな小石が散らばっており、その小石はずっと昔に液体の水が流れていた近くの沖積扇状地に由来していると科学者は考えている。 NASAの火星偵察オービターによる軌道からの観測により、マウントシャープの下層に粘土鉱物と硫酸塩鉱物が確認され、湿った歴史を示しています。より高い標高では、科学者は境界層と、「大規模な乾燥現象」と古代火星の表面での液体水の喪失につながった原因の兆候を発見することを望んでいます。
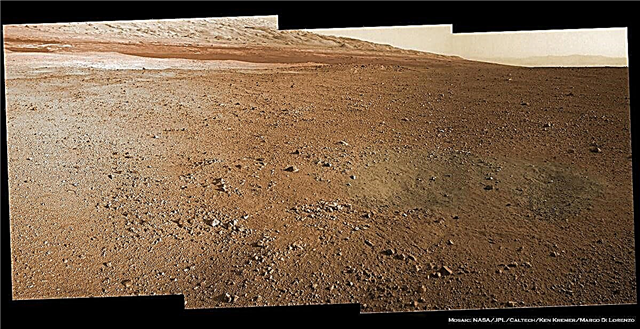
この週末の好奇心は、これまでに他をはるかに超える壮大な高解像度マストカム画像の送信も開始しました。これは、NASAがこれまでに組み立てたMastcam 360パノラマです。

画像の説明:好奇心のマストカム画像の最初の高解像度カラーモザイク。 NASA / JPL-Caltech / MSSS
しかし、車サイズのロボットが実際に動き回る前に、7フィート(2メートル)の長さの機器を搭載したアームで手を伸ばし、船内の化学実験室で分析するためにサンプルをすくい上げ、科学タスクを実行するためのソフトウェアスマートが必要です。
着陸後の最初の目標がすべて達成された後、カリフォルニア州パサデナにあるNASAのジェット推進研究所のエンジニアは4ソル、つまり火星の日を費やして、今週末を締めくくり、表面運用に最適化された「R10」という新しいソフトウェアパッケージをアップロードします。現在の「R9」パッケージを置き換えます。
火星科学研究所のミッションのチーフソフトウェアエンジニアであるカリフォルニア州パサデナにあるNASAのジェット推進研究所のベンチシー氏は、「ミッションのさまざまな段階で必要に応じてソフトウェアをアップグレードできるように、最初からミッションを設計しました」と述べています。 「キュリオシティが現在使用しているフライトソフトウェアバージョン[R9]は、実際に車両の着陸に重点を置いていました。不要になった多くの機能が含まれています。それは私たちにローバーを水上で操作するための基本的な機能を提供しますが、着陸後に実際に水上操作に最適化されたバージョンのフライトソフトウェアに切り替えることをずっと計画してきました。」
プライマリコンピューターとバックアップコンピューターの両方のソフトウェアは、段階的に慎重にアップグレードされます。彼は金曜日にアップグレードをテストする最初の「つま先のディップ」が最初のステップであると言いました。
「R10は地表操作用に最適化されており、科学チームが望んでいるものを備えています。 8月10日のJPLニュースブリーフィングでCichyは、次の4つのSolのインストール中にダウンロードされます。
「現在、基本的なサーフェスソフトウェアには機器の状態をチェックする機能がありますが、実際に火星に出荷されたこのような優れたハードウェアをすべて活用する能力はありません。」
「したがって、R10ソフトウェアは、ロボットアームを完全に使用し、ドリルを使用し、ダスト除去ツールを使用し、サンプリングチェーン全体を使用してサンプルを取り込み、分析する機能を提供します。 。」
「好奇心は火星のメガローバーであり、運転するために生まれました! R10を使用すると、自律的に運転し、画像を使用して危険を検出し、安全に運転することができます。」
これまでのところ、ソフトウェアのアップグレードは今週末に予定どおり行われています。
好奇心は8月5/6にゲイルクレーターの前にかつてないほど正確な着陸を行いました。ロケットからの「スカイクレーン」降下ステージを使用して、ケーブルで好奇心をケーブルで赤い惑星の表面に降ろしました。巨大な山のふもと。
シャープ山は、幅96マイル(154 km)のゲイルクレーターの内部の大部分を覆っています。高さ3.4マイル(5.5 km)の層状の山の頂上は、カリフォルニアのホイットニー山よりも背が高くなっています。
比較のために、低解像度の魚眼ハズカムカメラからの、2Dおよび3DでのマウントシャープのCuriosityの初期の広視野ポストランディングショットを参照してください。
NASAの1トンのメガローバーである好奇心は、これまでに他の惑星の表面に送られた最大かつ最も複雑なロボットであり、10台の最先端の科学機器のペイロードを搭載しており、これまでのロービング車両の15倍の重量があります。好奇心の目標は、火星が過去または現在の微生物の生命をサポートすることができたかどうかを判断し、有機分子の形で生命の兆候を探すことです。