MITのエンジニアと科学者は、火星の表面に野球サイズのロボットの群れを解き放つ戦略に取り組んでいます。これらのローバーの利点の1つは、溶岩管などの非常に危険な場所に送られる可能性があることです。これは、オペレーターが数人を失うことをあまり心配しないためです。
MITのエンジニアと科学者の同僚は、火星探査の未来について新しいビジョンを持っています。プローブの群れは、それぞれが野球のサイズであり、地球全体にあらゆる方向に広がっています。
燃料電池を搭載した何千ものプローブが、今日のローバーの到達範囲を超えた広大な領域をカバーできます。
MITの機械工学教授で研究チームを率いるSteven Dubowsky氏は、次のように語っています。
Dubowskyのチームは、この秋に地球上でプロトタイプをテストする予定であり、火星への旅行は約10年先であると推定しています。彼は現在、ニューメキシコ鉱業技術研究所の洞窟研究プログラムの責任者であるペネロペボストンと協力して、火星の起伏の多い地形を処理できるプローブを作成しています。
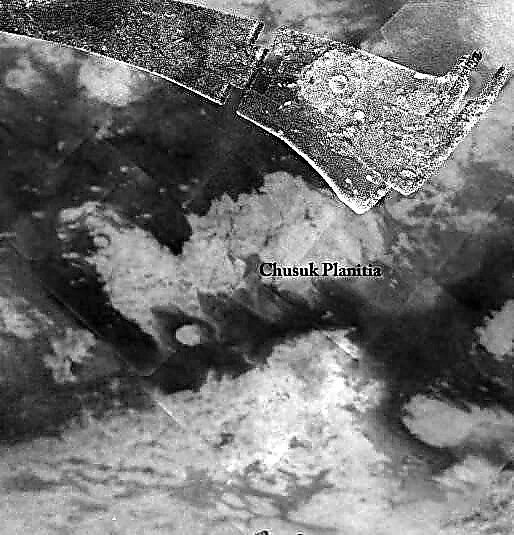
科学者たちは、火星でよく見られる溶岩洞窟が水の兆候を探すための有望な場所であると信じています。溶岩チューブは、地下の溶岩流によって取り残されたトンネルです。地上の多くの場所にも存在するこれらの管の兆候は、地上で見ることができます。
管は、火星の表面に形成された、管の一部がつぶれた穴から入ることができますが、これらの構成は、今日のローバーが探索するには危険すぎます。しかし、小さな跳ねるプローブが洞窟の中に入る可能性があります。
火星には、かつて川が流れていたはずの峡谷もあります。キャニオンもローバーにはアクセスできませんが、小さなプローブはキャニオンの面を下って行くことができるかもしれません。
Dubowsky氏によると、ミニプローブの主な利点の1つは、危険な領域に送られた数百または数千のプローブの数が失われても、全体的な使命が損なわれることはないということです。 「あなたは確かにこれらの1,000のボールのいくつかを犠牲にして喜んで遠く離れた地域から情報を収集するでしょう」と彼は言った。
各プローブの重量は約100グラム(4オンス)で、独自の小さな燃料電池を搭載します。 「あなたは、数グラムの燃料で長く、長い間飛び降りることができました」とDubowskyは言いました。
プローブ内の人工筋肉により、プローブは1時間あたり平均6回ホップし、最大速度は1時間あたり60ホップでした。デバイスはホップあたり約1.5メートル移動します。彼らはまたバウンスまたはロールすることができます。 Dubowsky氏によると、30日でプローブの群れが50平方マイルをカバーする可能性があります。
各プローブは、カメラや環境センサーなど、さまざまなタイプのセンサーを搭載しています。プローブは、火星旅行の過酷さや極寒に耐えることができる耐久性と軽量のプラスチックで作られています。彼らの燃料電池は、電子機器やセンサーを動作可能に保つのに十分な熱を提供します。
1000のプローブは、スピリットローバーと同じ体積と重量になります。 「Spiritの重量とサイズについては、1,000個を超えるこれらのセンサーを確実に送信することができます。これにより、はるかに優れた能力が得られます」とDubowsky氏は述べています。
プローブは、ローカルエリアネットワーク(LAN)を介して近くのプローブと通信できます。データは、情報を地球に送り返す基地局に送信されます。
小型ロボットの他の可能な用途には、倒壊した建物または他の危険な場所での捜索および救助任務、およびテロ対策活動(洞窟でのテロリストの捜索)が含まれます。
昨年、研究者たちはNASA高度概念研究所(NIAC)から資金を得ました。 NIACの助成金は、プロジェクトをコンセプトステージからプロトタイプステージに移行するのに役立つことを目的としています。
プロジェクトの他の共同研究者には、機械工学科の博士研究員であるJean-Sebastien Plante、およびスタンフォード大学のFritz PrinzとMark Cutkowskyが含まれます。
元のソース:MITニュースリリース