[/キャプション]
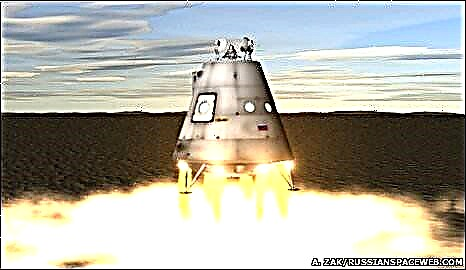
ロシアの次世代有人宇宙船のエンジニアは、地球に正確に着陸するロケット式着陸システムを検討しています。ロシアは、40年近く使用されてきたソユーズに代わる新しい宇宙船を開発しています。ロケット式着陸システムが承認された場合、有人車両が着陸のためにロケットエンジンのみに依存するのは史上初めてです。
以前のすべてのロシア/ソ連有人任務は、パラシュートを使用して地球に着陸しましたが、ロシアのシャトルであるブランは 宇宙に飛んだことはありません。 1988年に1機の無人宇宙飛行を行いました(初期の米国のミッションではパラシュートを使用し、シャトルでは翼と車輪を使用して着陸しました)。
ロシアが東部に宇宙船を建設しているのは、この着陸アーキテクチャの変更が検討されているためです。バイコヌールの現在の宇宙港はカザフスタンの新しく独立した共和国にあり、ロシアの政治家は宇宙飛行のためのカザフスタンへの依存を終わらせたいので、新しい宇宙港は非常に政治的な決定です。

したがって、ロシアのエンジニアは、次世代の宇宙船の機動性を向上させるという政治的な圧力にさらされており、比較的小さな着陸エリアに誘導される可能性があります。
昨年7月、コロレフに本拠を置くRKK Energiaは、当時ロシアがヨーロッパとの協力で開発することを望んでいたAdvanced Crew Transportation System(ACTS)として知られる多目的輸送船の最初の図面をリリースしました。
格納式着陸脚と再利用可能な熱保護システムを組み合わせることで、着陸ロケットは再利用可能なカプセルの可能性も提供します。
RKK Energiaの第一人者であるニコライブリュハノフ氏が浜松市で開催された第26回宇宙技術および科学に関する国際シンポジウムでのプレゼンテーションによると、宇宙船はカプセルが高度600-800mの高さミッションの終わりに再び大気圏に入った後、地球に向かってストリーキングします。
垂直降下の後、高さ30mの高度で精密着陸が開始されます。
コンセプトは、冷戦の終わりに放棄された、1990年代にテストされた米国の実験的なDC-X車に似ています。
出典:BBC